
複素平面

数学において、複素平面(ふくそへいめん、独: Komplexe Zahlenebene, 英: complex plane)[1]あるいは数平面[2](すうへいめん、独: Zahlenebene)、z-平面とは、複素数 z = x + iy を直交座標 (x, y) に対応させた直交座標平面のことである。複素数の実部を表す軸を実軸 (real axis) (実数直線)、虚部を表す軸を虚軸 (imaginary axis) という。
1811年頃にガウスによって導入されたため、ガウス平面 (Gaussian plane) とも呼ばれる[3]。一方、それに先立つ1806年に Jean-Robert Argandも同様の手法を用いたため、アルガン図 (Argand Diagram)[4] とも呼ばれている。さらに、それ以前の1797年の Caspar Wesselの書簡にも登場している。このように複素数の幾何的表示はガウス以前にも知られていたが、今日用いられているような形式で複素平面を論じたのはガウスである[3]。三者の名前をとってガウス・アルガン平面、ガウス・ウェッセル平面などとも言われる[3]。
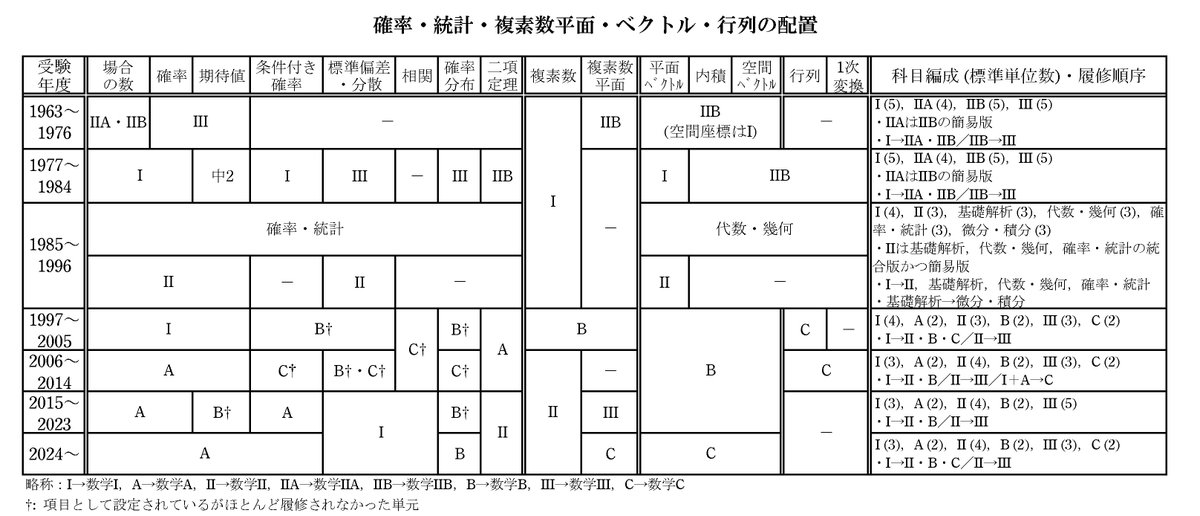
英称 complex plane の訳として複素数平面と呼ぶことも少なくないが[5]、大学以上の数学書では『複素平面』または『ガウス平面』の方が〔複素数平面よりも〕圧倒的に主流であるとの見解がある[6]。しかし、接頭辞「複素—」を「係数体を複素数体とする」という意味に解釈すると、複素数を成分とする「平面」という意味になり、C2(実部と虚部に分けると実4次元線形空間)[注釈 1](二次元複素解析空間)を指すので、文脈によってどちらを指しているかは注意が必要である。1997年以降[7]、日本の高等学校の学習指導要領では「複素数平面」が用いられている。
概観[編集]
複素数 z = r(cosα + i sinα)(r ≥ 0, α は実数)に cosβ + i sinβ(β は実数)を掛けると、z の偏角が β 増える。このことから、虚数単位 i = cosπ/2 + i sinπ/2 は、実数直線における実数単位 1 を原点中心、反時計回りに 90° 回転した位置にあると考えることができる。そこで、実数直線を拡張し、実軸と虚軸からなる座標平面を導入すると、複素数の演算が幾何学的な操作に対応し、見通しが良くなる。この平面を複素平面という。複素平面では、複素数の実部、虚部が点(位置ベクトル)のそれぞれ x座標(x成分)、y座標(y成分)に対応する。
絶対値は、複素平面においては、その複素数が表す点と原点 O(0) の距離に等しい。複素共役は、実軸対称に当たる。
複素数 z を直交座標表示すると、z = x + yi(x, y は実数)となり、加法・減法・実数倍 は、幾何学的には平面上の平行移動および原点中心の拡大縮小に対応する。z を極形式表示すると、z = r(cosθ + i sinθ)(r ≥ 0, θ は実数)となり、ド・モアブルの定理より、乗法・除法・冪乗は原点中心の θ 回転に対応する。
複素数を、複素数への左からの[注釈 2]作用と考えると、平面 R2 上での原点を動かさない反転や回転を含む線型変換(一次変換)を引き起こす。この一次変換の表現行列は、複素数の実二次正方行列としての実現と考えることができる。
複素数の代数的演算により、ガウス平面上で平行移動と任意の一次変換が行えるから、したがって任意のアフィン写像を施すことが可能である。ここで、ガウス平面に無限遠点を付け加えて1点コンパクト化し、ガウス平面を拡張したリーマン球面(補完数平面)上で考えると、複素数 x + iy はリーマン球面上の点 [x : y : 1] と見なせる。リーマン球面上のアフィン変換は一次分数変換であり、複素数をアフィン変換の表現行列として実現することもできる。
導入[編集]
歴史上、複素平面のアイデアをはじめて発表したのは、当時デンマークの支配下にあったノルウェー生まれの技師、Caspar Wessel(1745~1818)だといわれている。Wesselは、虚数および複素数を測量技師の仕事に役立てるための研究を独自に行った。その結果、今でいう複素平面のアイデアにたどり着き、それを『方程式の解析的表現について』と題する論文にまとめて1799年に発表した。またその2年前の1797年には、同じ内容をデンマーク科学アカデミーに発表している。しかし、これらの発表はデンマーク語で行われたものだった。当時のヨーロッパではデンマーク語で書かれた文献が国外で広く読まれることは多くなく、それから100年もの間、日の目を見ることはなかった。彼のアイデアが社会に広く知れわたることになったのは、彼の死からはるか後の1899年、論文がフランス語に翻訳されたときのことだった。このときには既に、フランスの数学者Jean-Robert Argand(1768~1822)やドイツの数学者カール・フリードリヒ・ガウス(1777~1855)の発見したアイデアとして広く知られるようになっていた。とくにガウスは、Wesselより先に複素平面のアイデアにたどり着いていた可能性が高いとみられている。1796年、ガウスは正十七角形が定規とコンパスだけで作図できることを発見した。この作図には、複素数や複素平面を駆使しなければならない。この事実は、ガウスが少なくとも1796年の時点で複素数平面のアイデアにたどり着いていたことを示している[8]。
空間としての複素平面[編集]
複素平面の導入により、複素数全体 C には幾何学的な意味づけができる。
線形空間[編集]
複素平面は、実数体 R 上の2次元線形空間である。(1, i) は、複素平面の基底である。
複素数の絶対値により、複素平面は乗法的ノルム線型空間である。
係数体を複素数体 C とすると、C は複素「直線」(次元 1)である。
距離空間[編集]
複素平面 C は、距離函数

について完備距離空間である。
この事実は、代数学の基本定理の証明に使われる。
コンパクト化[編集]
複素全体 C に無限遠点を付け加えるとコンパクト空間 C ∪ {∞} になる(1点コンパクト化)。C ∪ {∞} は2次元球面 S2 に同相である。この2次元球面をリーマン球面という。
係数体を C と見た場合、 C は複素直線と呼ばれ、C ∪ {∞} は複素射影直線と呼ばれる。
複素数の積と回転[編集]
複素数の乗除は、極形式表示し、ガウス平面上での幾何学的操作を考えると、見通しが良くなる。
複素数 z = x + yi(x, y は実数)に対して、直交座標表示 (x, y) の極座標表示を (r, θ) (r ≥ 0) とすると、x = r cosθ, y = r sinθ より、

と表すことができる。この右辺の表示式を複素数 z の極形式 (polar form) と呼ぶ[9][10]。
r は z の絶対値 に等しく、θ を z の偏角 (argument) と呼び、記号で argz で表す[10]。

- (θ は 2π の整数倍の差を除いて決まり、一つの値ではない。一つの値に決める場合、θ の範囲を区間 (−π, π] などに制限する。この区間を偏角の主値といい、値域を制限した arg を、大文字のAを使って Argz で表す)[9]

オイラーの公式 eiθ = cosθ + i sinθ を使うと、極形式は

と簡単に記述できる[10]。
2つの複素数 z, w の積 zw を計算するのに、z, w を極形式表示し
- z = r(cosα + i sinα),
- w = s(cosβ + i sinβ)
- cos(α + β) = cosα cosβ − sinα sinβ
- sin(α + β) = sinα cosβ + cosα sinβ
より、

となり、zw の極形式が得られる。ゆえに


となり、積 zw は、複素平面において、z を原点中心に argw 回転、|w| 倍に相似拡大して得られる点だと分かる。
特に、絶対値が 1 の複素数を掛けることは、複素数平面において原点中心の回転を施すことと同等であると分かる。
注[編集]
注釈[編集]
出典[編集]
- ^ 竹内『函数概論』p.6, 高木貞治『代数学講義』など
- ^ 竹内端三『函数概論』、6頁。""数平面 : complex or Gaussian plane : Zahlenebene(p.123 巻末用語対訳)""。
- ^ a b c ブリタニカ国際大百科事典小項目事典『ガウス平面』 - コトバンク
- ^ Weisstein, Eric W. "Argand Diagram". mathworld.wolfram.com (英語).
- ^ 例えば岩波数学辞典
- ^ 示野信一 (2012年11月5日). “複素数平面 vs 複素平面”. blog: 数学雑談. 2019年8月12日閲覧。
- ^ “学習指導要領の変遷”. pbs.twimg.com. pbs.twimg.com. 2024年2月7日時点のオリジナルよりアーカイブ。2024年2月7日閲覧。
- ^ 『Newton別冊 虚数がよくわかる[改訂第二版]』ニュートンプレス、2020年4月10日、68頁。
- ^ a b E.クライツィグ(著)、近藤次郎(監訳)、堀素夫(監訳)、丹生慶四郎(訳)『技術者のための高等数学4 複素関数論(原書第8版)』 培風館、2003/03, ISBN 978-4-563-01118-5, pp.6-9
- ^ a b c 松田哲 『複素関数 (理工系の基礎数学 5)』岩波書店 (1996/6) ISBN 978-4000079754, pp.4-6
{kind=link}
{kind=link}
参考文献[編集]
関連項目[編集]
外部リンク[編集]
- Weisstein, Eric W. "Complex Plane". mathworld.wolfram.com (英語).
- complex plane in nLab(英語)
- topology of the complex plane - PlanetMath.(英語)
- Definition:Complex Number/Complex Plane at ProofWiki(英語)