| この記事は検証可能な参考文献や出典が全く示されていないか、不十分です。出典を追加して記事の信頼性向上にご協力ください。(このテンプレートの使い方)
出典検索?: "パルス幅変調" – ニュース · 書籍 · スカラー · CiNii · J-STAGE · NDL · dlib.jp · ジャパンサーチ · TWL(2015年10月) |
パルス幅変調(パルスはばへんちょう、英語: pulse width modulation、PWM)とは変調方法の一つであり、パルス波のデューティ比を変化させて変調すること。
パルス幅変調の式[編集]
パルス幅変調の数学的扱いは次のようになる[1]。簡単のため、入力信号として正弦波  の場合を考える。
の場合を考える。
ここで  は物理量を表す定数、
は物理量を表す定数、 、
、 はそれぞれ角振動数、時間である。
はそれぞれ角振動数、時間である。
また、変調されていないときのパルス波は、周期  ごとに幅
ごとに幅  (ただし
(ただし )の
パルスを出力するものと仮定する。
)の
パルスを出力するものと仮定する。
このとき、パルス幅変調された信号  は、周期 ごとに幅
は、周期 ごとに幅  のパルスが出力されるように変調される。
のパルスが出力されるように変調される。
 は変調度で、
は変調度で、 でなければならないので
でなければならないので
 を満足しなければならない。
を満足しなければならない。

ここで、 はヘヴィサイドの階段関数、
はヘヴィサイドの階段関数、
 は次元を持ったなんらかの定数である。
ヘヴィサイドの階段関数のフーリエ変換表示
は次元を持ったなんらかの定数である。
ヘヴィサイドの階段関数のフーリエ変換表示

や公式

を用い(ただし、 はディラックのデルタ関数)
[2]、
適時積分と和の入れ替えを行うと、
は
はディラックのデルタ関数)
[2]、
適時積分と和の入れ替えを行うと、
は


と書ける。
ここで、が時間の並進 に対して
不変であることを用いると[3]、
に対して
不変であることを用いると[3]、
 をもう少しきれいに書き直すことができて、
をもう少しきれいに書き直すことができて、

である。最後の項 にを代入すると、
これはFM変調の式であることがわかる。
にを代入すると、
これはFM変調の式であることがわかる。
 であるから、
ローパスフィルタでを除去できれば、
であるから、
ローパスフィルタでを除去できれば、 分シフトされて
元の信号が復調される。
分シフトされて
元の信号が復調される。
アナログシンセサイザー[編集]
エンベロープジェネレーターやLFOなどサブオシレータでパルス幅を変化させ、
- 発振するほどの高速変化により、独特の非整数倍音を生成すること。
- 音量エンベロープのような低速変化により、連続的に音色変化(パルス波から矩形波など)させること。
音源チップ[編集]
電源回路[編集]
インバータにより直流を交流に変換したり、チョッパ制御により直流電圧を制御する他、整流器(PWMコンバータともいう)としても用いられる。いずれも電源電圧より高い電圧を得るためにはリアクトルの充放電機能を用いる。また脈流や高調波となって出力されるため、やはりリアクトルを用いてそれらを平滑化する必要がある。
チョッパ制御[編集]
 チョッパ制御におけるPWMの例
チョッパ制御におけるPWMの例
高周波分巻式を除くチョッパ制御の場合、パルスの周波数は一定であり、パルスの幅だけを変化させることで平均電圧を可変とする。パルス幅が狭い場合は平均電圧が下がり、パルス幅が広いときは平均電圧が上がる。例えば次のパルスまでを10等分したとして、ON:OFFを2:8とすれば元の電圧の2/10つまり1/5になり、8:2なら8/10=4/5の電圧が得られる。100%の電圧が必要なときは単にONのままにするが、チョッパ装置そのものも抵抗となるため、それを短絡して直接負荷に流すこともある。
インバータ[編集]
 インバータにおけるPWMの例
インバータにおけるPWMの例
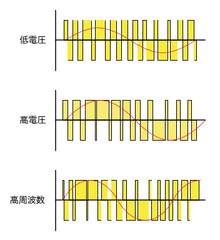
マイコンにより、スイッチング素子のゲート電極に信号を流すタイミングを決めるためには、搬送波(もしくはキャリア)と呼ばれる三角波と、基本波(もしくは信号波)と呼ばれる正弦波を用いて、PWMで制御するインバータが一般的である[4]。ゲート電極に信号を流すゲートドライブが搬送波と基本波の交点を検出し、4個(三相交流では6個)のスイッチング素子をオン/オフする。すると、右図のようなパルス(黄色い矩形)が得られ、その平均電圧(赤い線)が疑似正弦波交流になる。
これ以外にも信号を流すタイミングを決める方法はあるがここでは割愛する。
上記は2レベルインバーターである。2レベルというのは、パルスの電圧として100%、0%の2つを使っているという意味である。100%、50%、0%の3つの出力電圧を使うインバーターを3レベルインバータという。このようなインバータをマルチレベルインバータと称する。
- ^ 初等的な信号変調の教科書にならどの本でも書いてある。例えば、(F.R.コナー 1985)などを参照。
- ^
 の定義域に注意。は有限区間
の定義域に注意。は有限区間![{\displaystyle \;[0,1]\;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0a397dcf4e8cfe9593afcb6d71dc2b77e900aaba) に制限されていないので右辺の
に制限されていないので右辺の の和を忘れてはいけない。
の和を忘れてはいけない。
- ^
 なので有限の並進に対して不変である。
なので有限の並進に対して不変である。
- ^ 搬送波はスイッチング素子の動作周波数を示し、基本波は出力する交流の波形を示している
参考文献[編集]


