
プラニメータ

プラニメータ (Planimeter) は、地図など平面上の図形の輪郭をなぞることにより、その面積を計測する装置。面積計ともいう。
多角形の面積を計算するには図形の隣り合う2つの頂点とある特定の点を結んでできる三角形の面積を加算(積分)することで得ることができる。プラニメータはこの原理を利用している。
以前は写真のような機械式のものが多かったが、現在は二つの車輪の回転量から面積を測定するデジタル型のものが主流になっている。
動作原理
[編集]-
 リニアプラニメータ
リニアプラニメータ -
 ポーラープラニメータ
ポーラープラニメータ


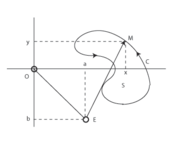
上図を用いてリニアおよびポーラープラニメータの動作を示す。測定する表面 S の輪郭 C にプラニメータの一端にあるポインタ M を沿わせる。リニアプラニメータの場合、エルボ E の動きはy軸上に制限されている。極プラニメータの場合、原点 O とつながっているアームのもう一方の端点にエルボ E は接続されている。アーム ME には、回転軸が ME に平行な測定ホイールが接続されている。アーム ME の動きは、ホイールが回転することで起こる ME に垂直な動きの成分と、ホイールが滑ることで起こる ME に平行な動きの成分とに分解される。平行な動きの成分は読み取りには影響しない。

動作原理の概略説明のため、例としてリニアプラニメータを用いて右図の長方形 ABCD の面積を測定することを考える。測定は以下のステップからなる。
- ポインタ M を A から B に移動すると、アーム EM は黄色の平行四辺形 を移動する。この平行四辺形の面積は PQ×EM に等しく、さら平行四辺形 の面積とも等しい。測定ホイールで距離 PQ(EM に垂直)を測定する。
- ポインタ M が C から D に移動すると、アーム EM は緑色の平行四辺形を反対方向に移動する。この平行四辺形の面積は長方形 の面積に等しい。測定ホイールは前者からこの読み取り値を差し引く。
- BC と DA に沿った動きは同じだが向きが反対であるため、ホイールの読み取りに正味の影響を与えることなく、互いに打ち消し合う。
- 最終的な結果として、ABCD の領域である黄色と緑色の領域の差の面積が測定される。



数学的説明
[編集]より数学的に厳密には、リニアプラニメータの動作は次式の成分を持つ (x,y) 平面上のベクトル場

にグリーンの定理を適用することで説明できる。ここで bはエルボ E の y 座標である。
このベクトル場 は測定アーム EM に垂直である。つまり


また の大きさ(ノルム)は一定でありアームの長さ m に等しい。つまり

したがってグリーンの定理を用いて

となる。ここで

を用いた。
したがって上式の左辺は輪郭で囲まれた面積 A に等しい訳だが、これはホイールで測定された距離に比例する。比例係数は測定アームの長さ である。

リニアプラニメータはその測定アームに垂直な動きのみを、あるいは のときのみ記録を行っていることに注意する。上記の導出にはこのことが用いられている。この量を閉曲線 C で積分しグリーンの定理を用いることで面積が導出される。

関連項目
[編集]外部リンク
[編集]この項目は、工学・技術に関連した書きかけの項目です。この項目を加筆・訂正などしてくださる協力者を求めています(Portal:技術と産業)。 |